這篇是我機器人的隨手筆記,是整合實驗紀錄而來。
因為新加坡硬體零件太貴,而中國物流速度太慢,導致每次實驗都隔好幾天,所以我會隨筆紀錄目前進度。該作品型號是 TT038QR,意義:
| 名稱 | 意義 |
|---|---|
| TT | Tinytsunami |
| 038 | 第 38 號作品,由於只有硬體會給編號。另外我的 3D Printer CAD 比電路硬體多,所以是依照 CAD 的模型給編號。 |
| QR | 可辨識縮寫。四足機器人(Quadruped Robot) |
然後補上版本號,例如 TT038QR-4 就是第四版。
Before 2025-08-02 a1 版實驗
實驗對象
TT038QR-a1 電路
實驗目標
- 完成電路硬體
- 測試充電功能
實驗結果
失敗
失敗原因
- 電路板設計錯誤,特別是充電部份。
註記
- 本次電路板由廠商焊接。
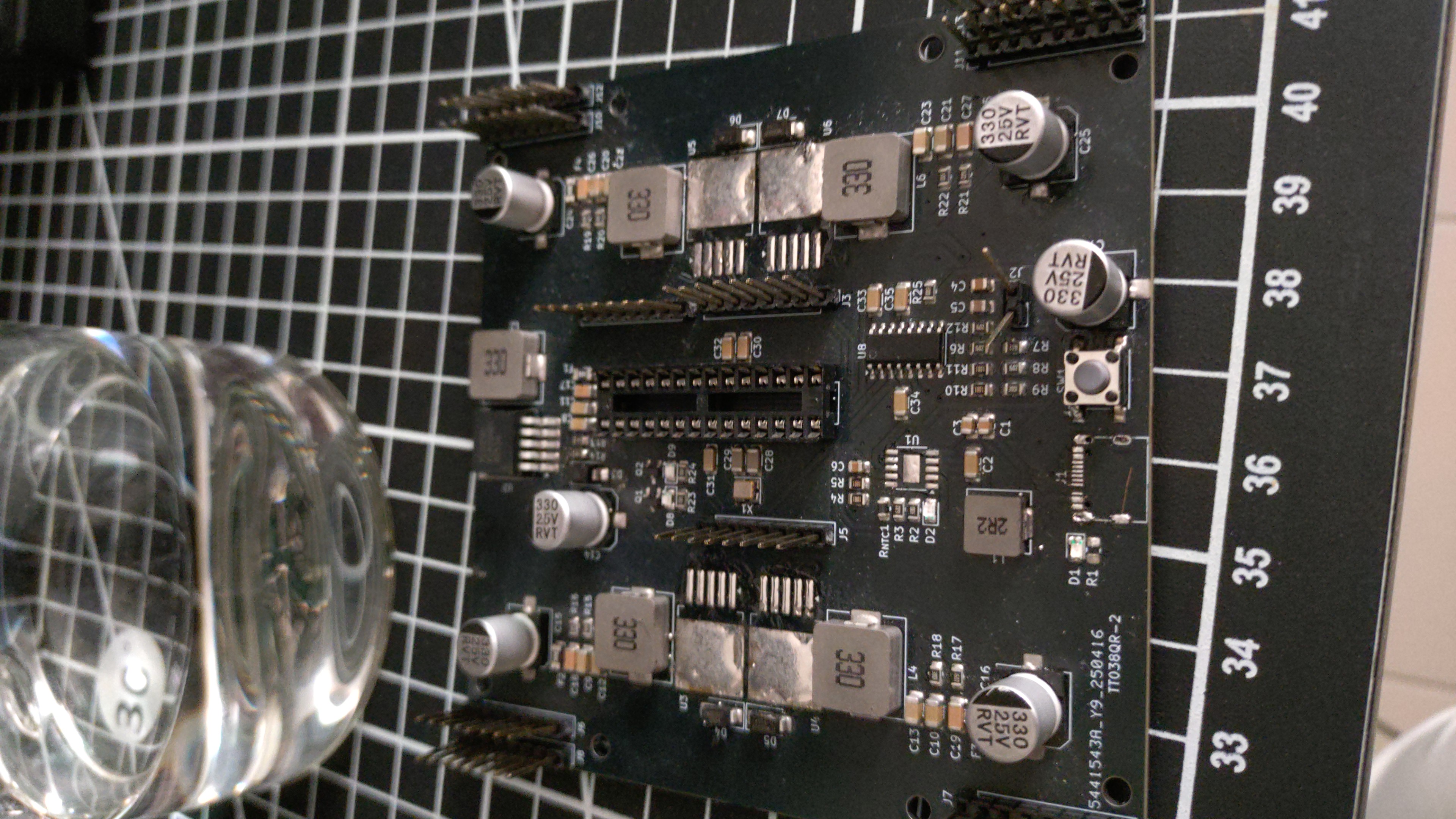
2025-08-02 a2 版焊接測試
實驗對象
TT038QR-a1 電路 ⇒ TT038QR-a2 電路
實驗目標
- 取得未焊接電路板
- 焊接電路板
實驗結果
失敗
失敗原因
- 蕭特基二極體焊接極性相反
- 石英晶體震盪器選型錯誤(誤用有源震盪器)
- 完成修復後,預計能正常運作 ATMEGA328 晶片
註記
- 這次是自己焊接的版本。
- 下次再焊一塊,檢查 LED 跟其他部分運作正常 ⇒ 用 7E16000E20UCG 無源測試。
- 測試寫入 Ardunio 的 Bootloader 正常。
- 重製板子,要點如下:
- 使封裝變小
- 注意接口的電流承受能力
- 送印
2025-09-09 a2 版焊接測試 2
實驗對象
TT038QR-a2 電路
實驗目標
- 取得未焊接電路板
- 焊接電路板
實驗結果
失敗
失敗原因
- 焊錫保存時間過長,導致助焊劑失活
- 鋁板殘渣過多
註記
- 由於焊接太容易失敗,考慮應該採用直接送件製作降低成本
- 避免浪費,已經測試過的部分包含:
- 電源管理電路正常(低風險)
- MCU 正常運作(低風險)
- 燒錄過程使用獨立CH340E 子板測試,電路已經整合進母板中(中度風險)
- 鋰電池充電電路,在上次已經使用,但當時電路是短路狀態(中度風險)
- 風險評估:
- 由 CH340E 板子,改成整合的 CH340C,最壞有可能導致無法透過 USB 燒錄資料,但由於有拉出 PIN 腳,所以就算放棄使用整合式 CH340C 也可以進行外部燒錄,僅浪費部分製造成本而已。
(中度風險→低風險) - 鋰電池充電電路若無法正常運作,也有獨立充電器可以使用。當時短路測試中,已經嘗試過鋰電池,並沒有發生爆炸問題。修復後,雖然充電未測試,但供電部分是正常的。電池自帶保護板。基於上述三點,認為既不存在可視範圍內之安全隱患、也存在當錯誤發生時的補救辦法。
(中度風險→低風險)
- 由 CH340E 板子,改成整合的 CH340C,最壞有可能導致無法透過 USB 燒錄資料,但由於有拉出 PIN 腳,所以就算放棄使用整合式 CH340C 也可以進行外部燒錄,僅浪費部分製造成本而已。
- 應直接修改電路並送件!而非繼續焊接。要點:
- 修改封裝
- 修改電池端子
- 小型 MG90S 馬達堵轉上限 0.8A,若全堵轉,會導致電池供電線路燒毀。
- 目前考慮分時多工來迴避大電流問題。
- 換成大電流的端子可以提供更多冗餘,優先考慮型號:
- XT30U 頭(15~30A)
- AWG18 線(5~7A)
- 馬達用杜邦線沒有問題(單路上線0.8A)
- 注意晶振的選型(已換好)
- 注意反向導通二極體的極性(廠商焊接注意即可)
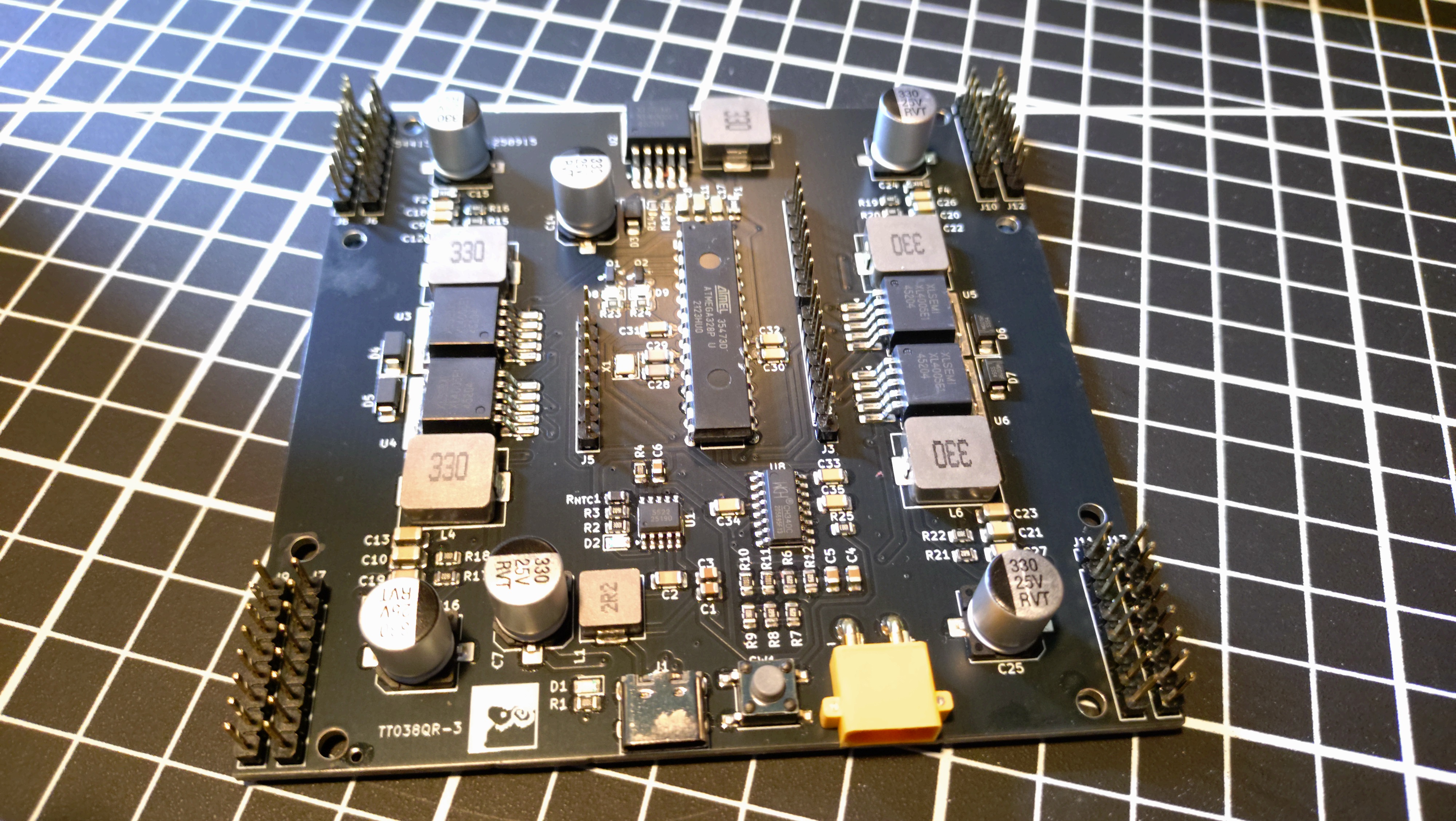
2025-09-15 a3 版送件
實驗對象
TT038QR-a2 電路 ⇒ TT038QR-a3 電路
實驗目標
- 硬體設計完成
- 硬體送廠商
實驗結果
成功
註記
- 一切修改完成,等待送件與送達。
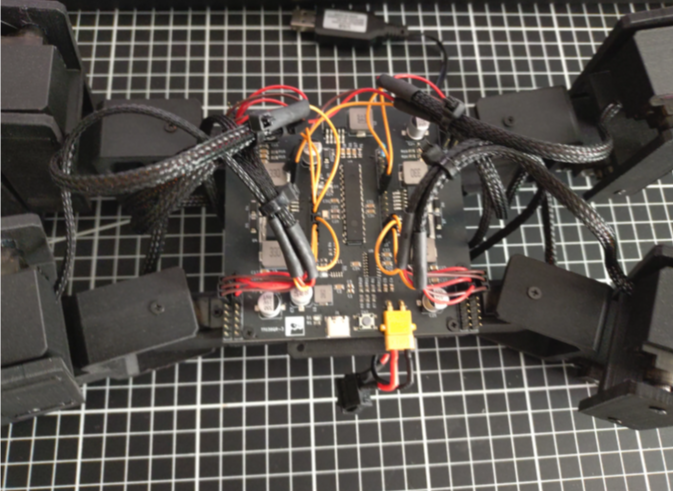
2025-09-20 a3 版硬體測試
實驗對象
TT038QR-a3 電路
實驗目標
- 硬體設計完成
- 硬體送廠商
- 檢查硬體
實驗結果
成功
實驗結果
- 滿足基礎功能:
- 能透過 Arduino as ISP 燒錄 Bootloader 進入 ATMEGA328 中
- 隨後透過內建 CH340C 晶片 + Arduino IDE 燒錄
- 尚不足的部分:
- XT30U 頭的正負弄反(絲印配合接頭正確、但配合電路是反向。)
低度風險、接頭無法修復、絲印可修復 - CH340C DRT - ATMEGA328 RESET 上拉電阻做成下拉。
低度風險、可透過電阻手工修復 - MOSFET 忽略電容效應與 body diode。
低度風險、可手工修復、訊號標記 LED 將無法點亮- 主要是忘記電容效應,導致 RXD/TXD 失真,$C_{GS}$ 會導致波失真。
- 2N7002 是 N-channel Enhancement-mode MOSFET 筆記:
- 當 $V_{GS}=0$ 有 body diode 導通(方向是 D→S)
- 當 $V_{GS} > V{th}$ 有 DS 雙向導通
- G 與 D、S 都絕緣
- XT30U 頭的正負弄反(絲印配合接頭正確、但配合電路是反向。)
後續
- 如果需要,可以再製 TT038QR-4,但目前堪用。
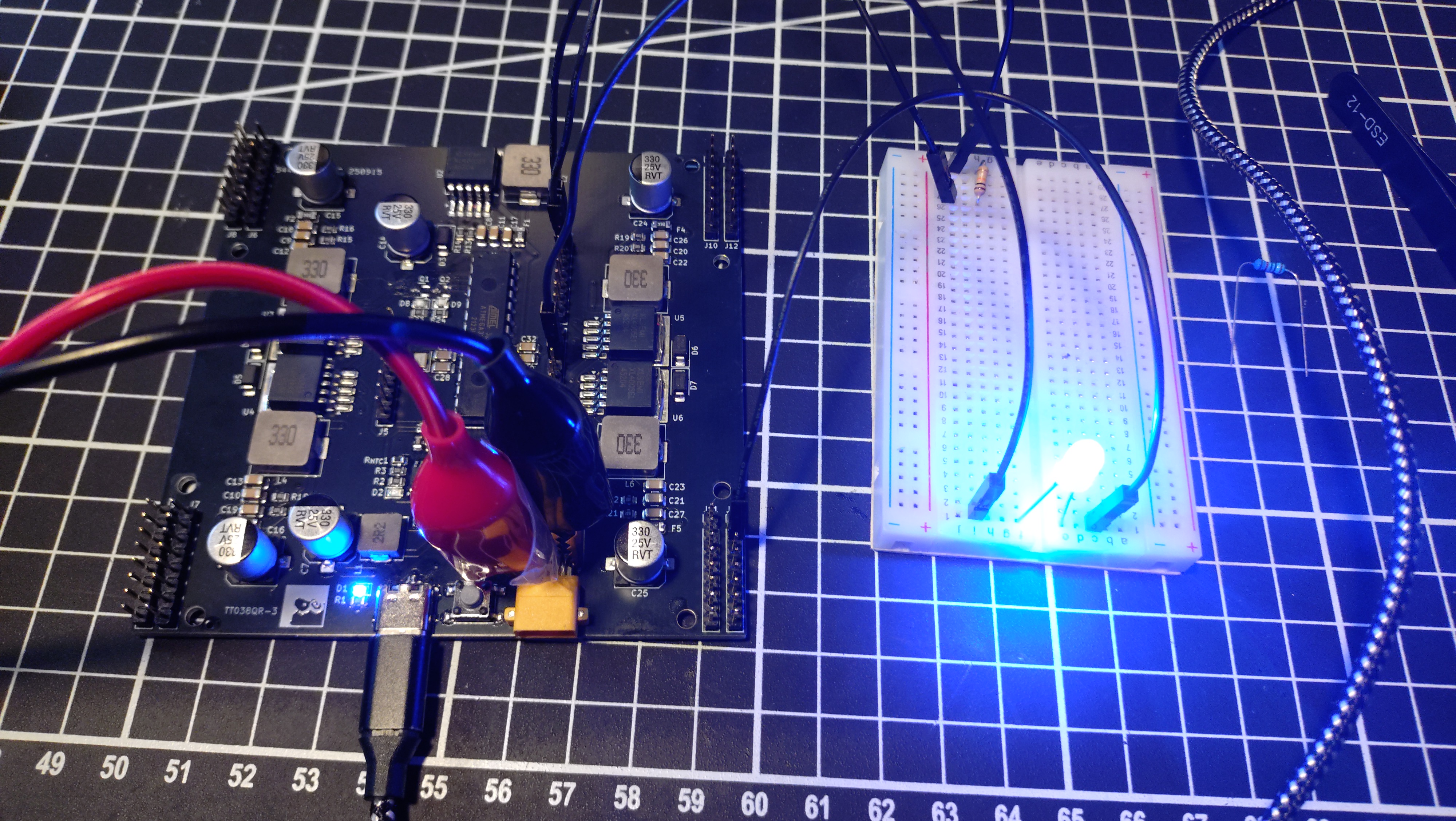
2025-09-22 a3 版維修與燒錄
實驗對象
TT038QR-a3 電路 ⇒ TT038QR-a3 電路(手工修復)
實驗目標
- 完成 a3 電路的手工修復
- 測試充電功能
- 測試 MCU 燒錄
實驗結果
成功
註記
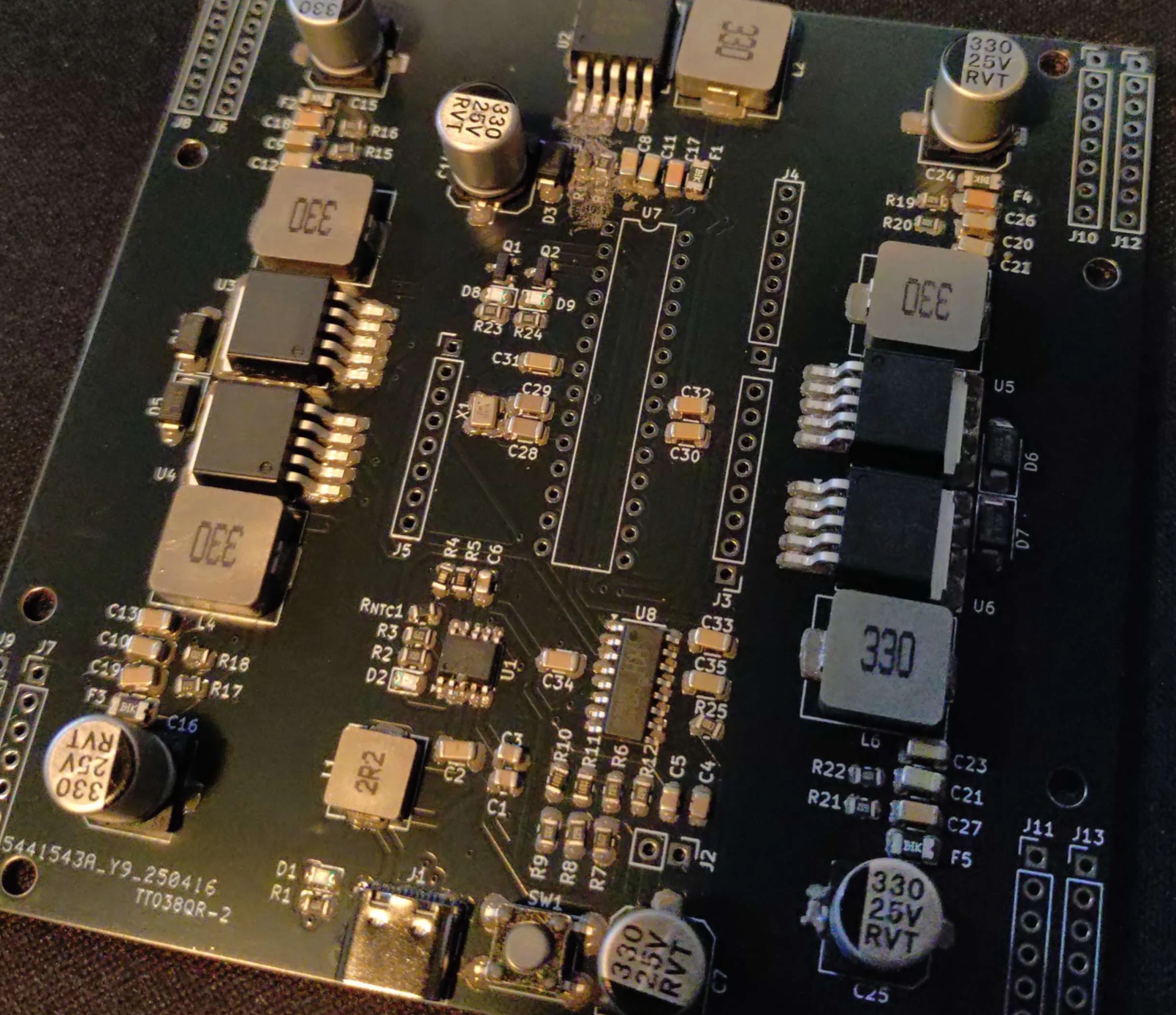
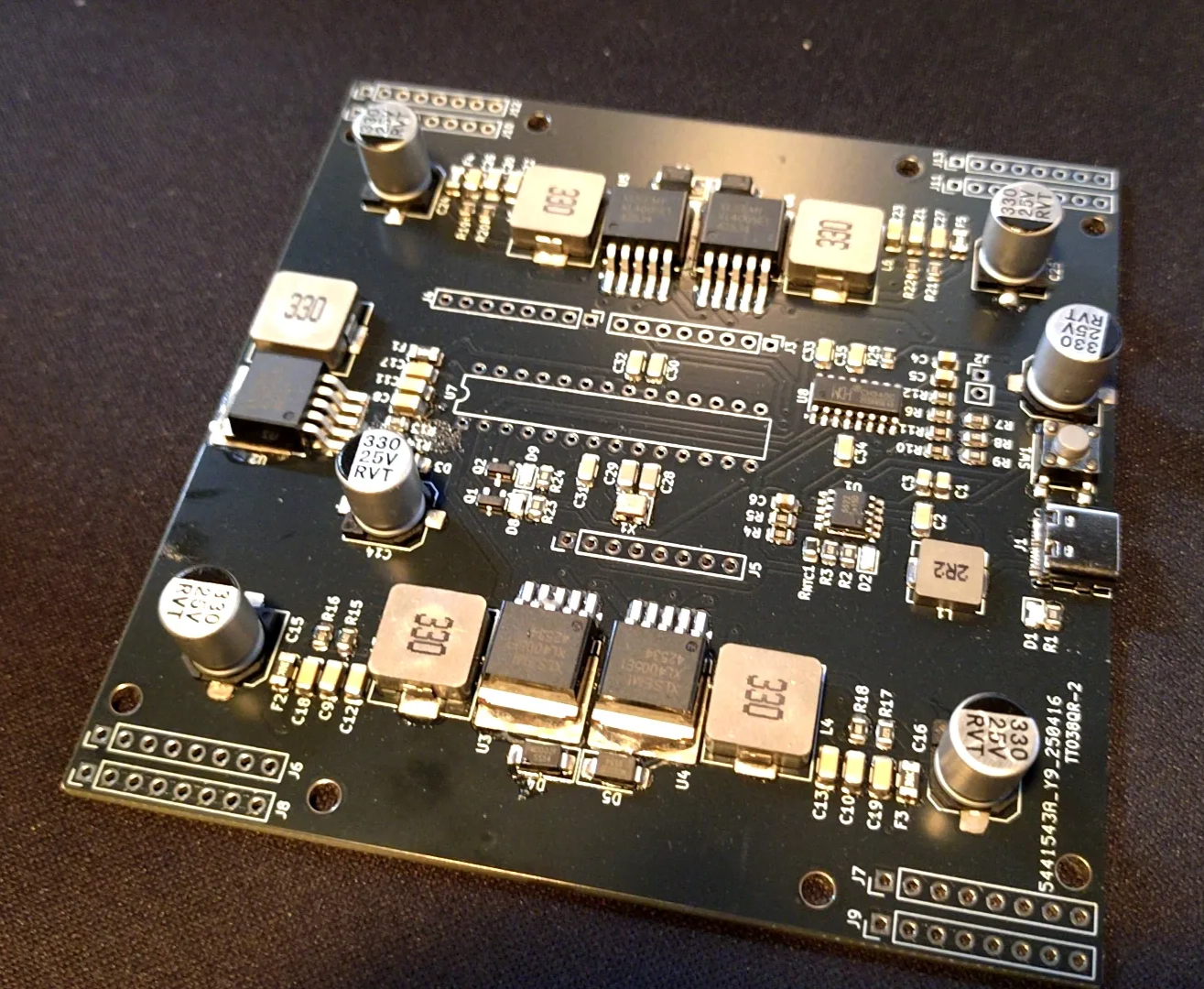
- 所有板子都已經燒錄 Arduino Bootloader 且硬體已經修復:
- DRT - RESET 現在已經有上拉電阻,下拉電阻已經移除
- Q1,2 移除後,電容效應造成的 RXD/TXD 訊號遺失已經修正
- XT30 接頭正負相反,已經使用標籤機打標
- 如果需要燒錄,要保證電池+ USB 都接上。假電池也可以。
2025-09-24 a3 版 CAD 列印
實驗對象
TT038QR-a3 機體
實驗目標
- 列印 a3 機體
實驗結果
失敗
失敗原因
- 材料受潮
註記
- 但獲得孔洞位置的校準數據
2025-09-28 a3 版 CAD 列印 2
實驗對象
TT038QR-a3 機體
實驗目標
- 列印 a3 機體
- 測試 a3 機體
實驗結果
成功
註記
- 新料 Matte PLA 送到,由於 PLA 易受潮,又沒有防潮措施,只能稍微處理,並加快用料速度。
- 材料差異:
- HS PLA 高速材料,通常能提速 2-3 倍,缺點:不好調教,貴
- Matte PLA 啞光材料,不反光
2025-10-05 a3 版 CAD 改設計
實驗對象
TT038QR-a3 機體
實驗目標
- 列印 a3 機體
- 測試 a3 機體
實驗結果
失敗
失敗原因
- 安裝尺寸不合
註記
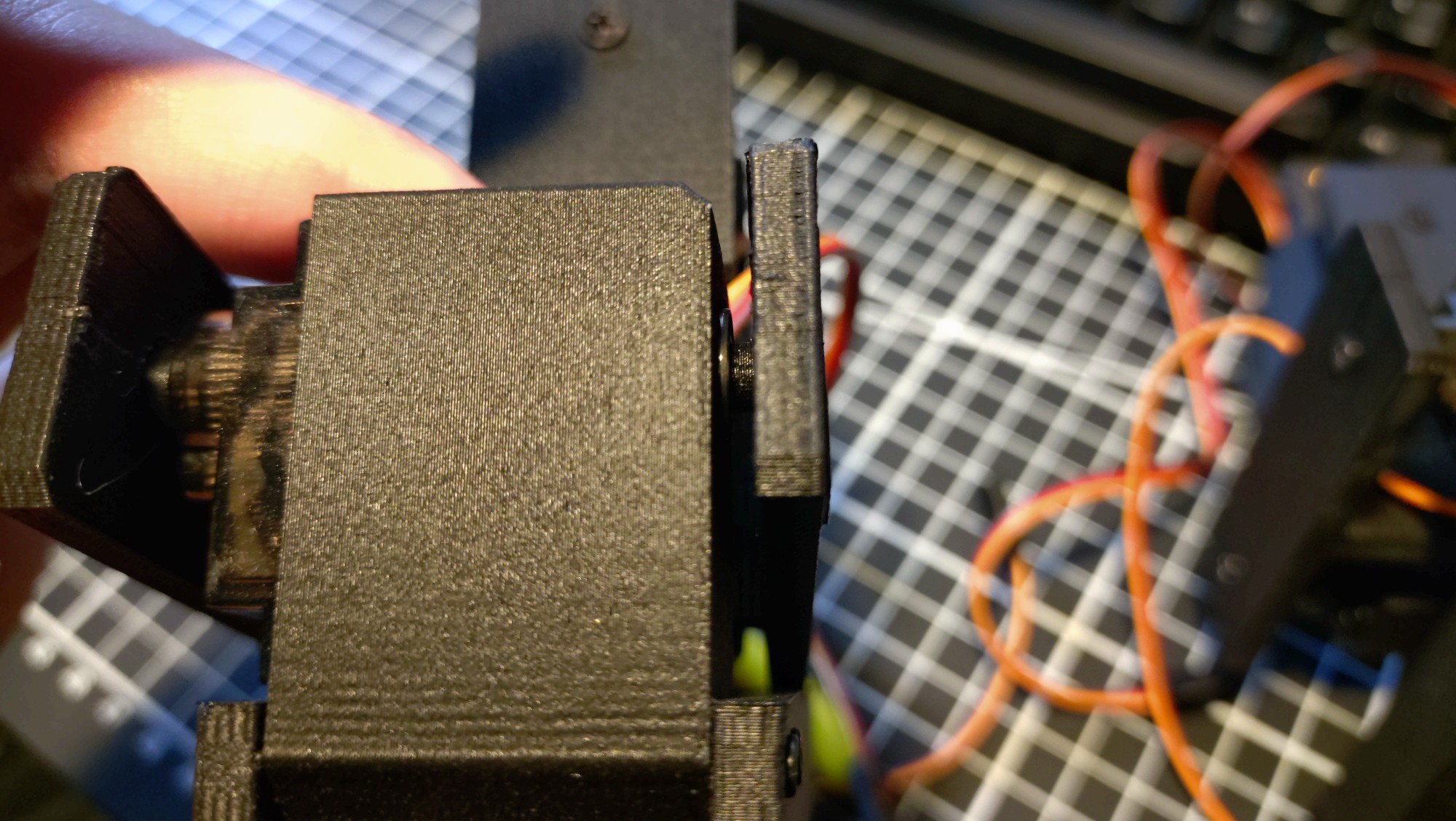
- coxa 與 body 接口要加長
- coxa 與 femur 需要改用直杆固定
2025-10-11 a3 版 CAD 列印 3
實驗對象
TT038QR-a3 機體
實驗目標
- 列印 a3 機體
- 測試 a3 機體
- 安裝 a3 機體
實驗結果
成功
註記
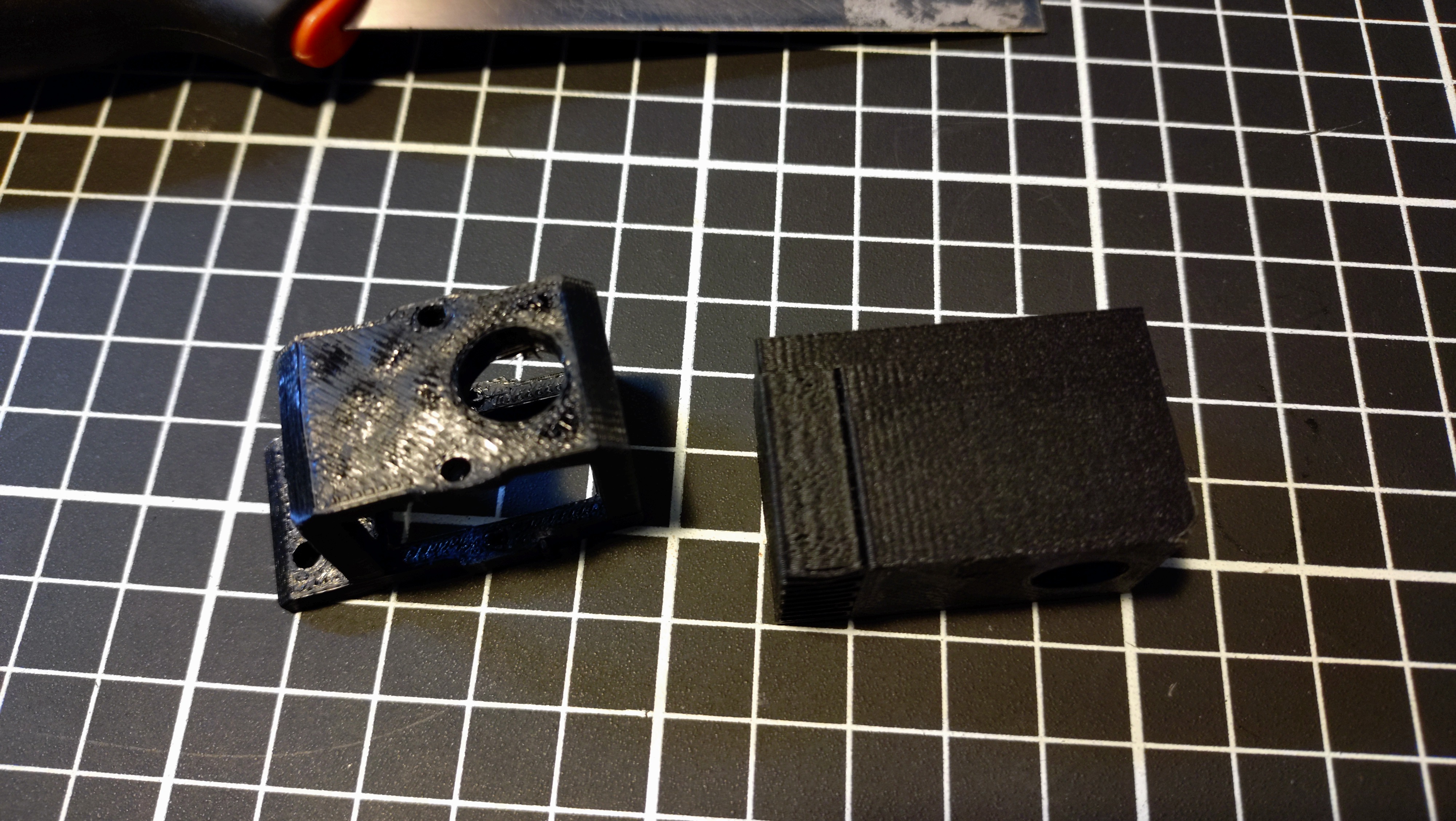
- 後處理要點:
- 支撐、牽絲、表面不平整都切削過,並再次過火熱處理
- 螺絲孔都用熱熔螺母、軸都用軸承固定
- 結構卡榫都用熱溶膠加固
- 設計改變:
- 檔案名稱命名結構採用通用標準
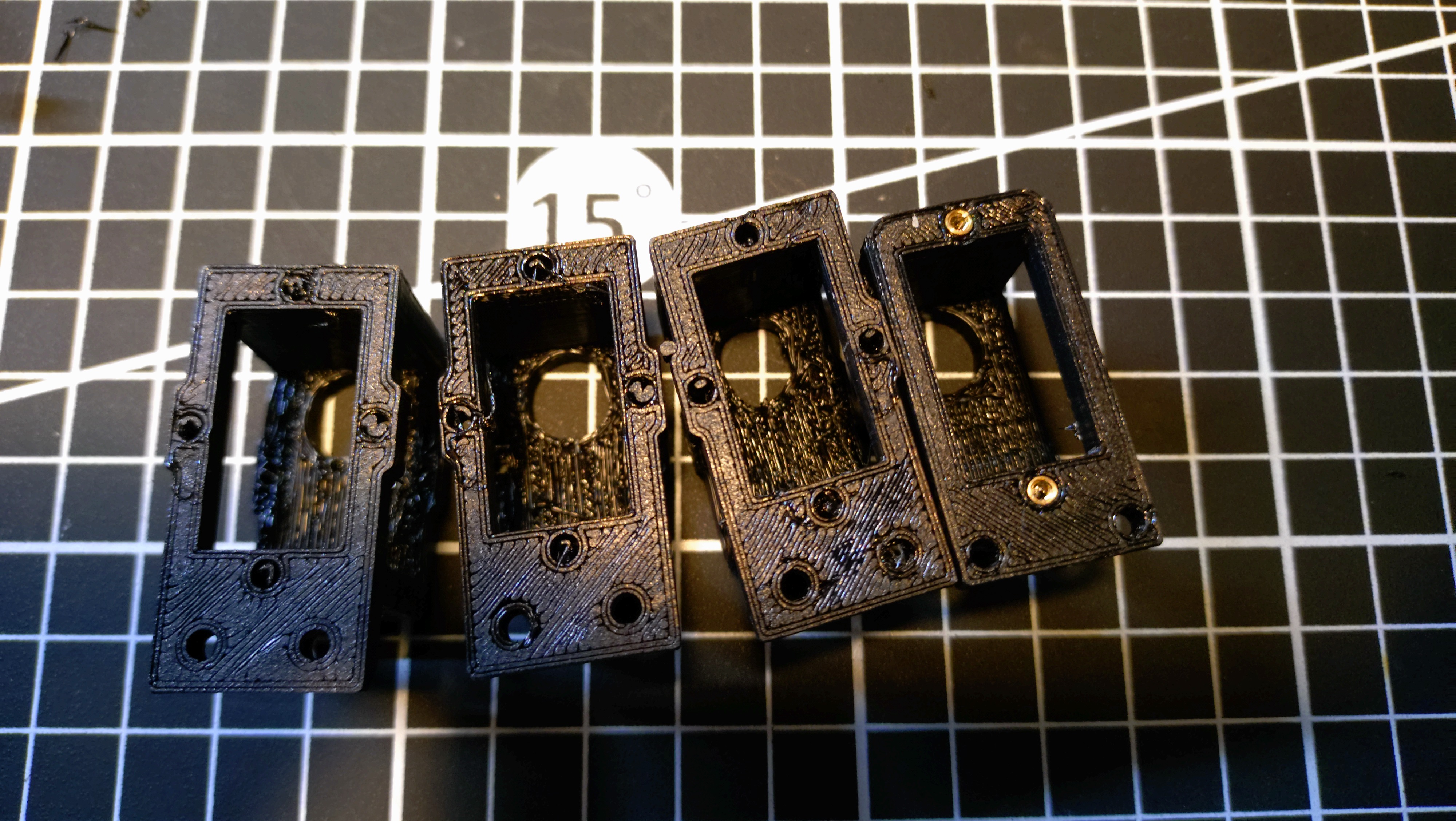
- 若有裝馬達,主要三大關節名稱為 coxa, femur, tibia
- 若沒裝馬達,於 femur-tibia 中間,稱為 femur-tibia link。
- 圓柱卡榫稱為 peg
- 終端執行被稱為 effector
- 檔案名稱命名結構採用通用標準
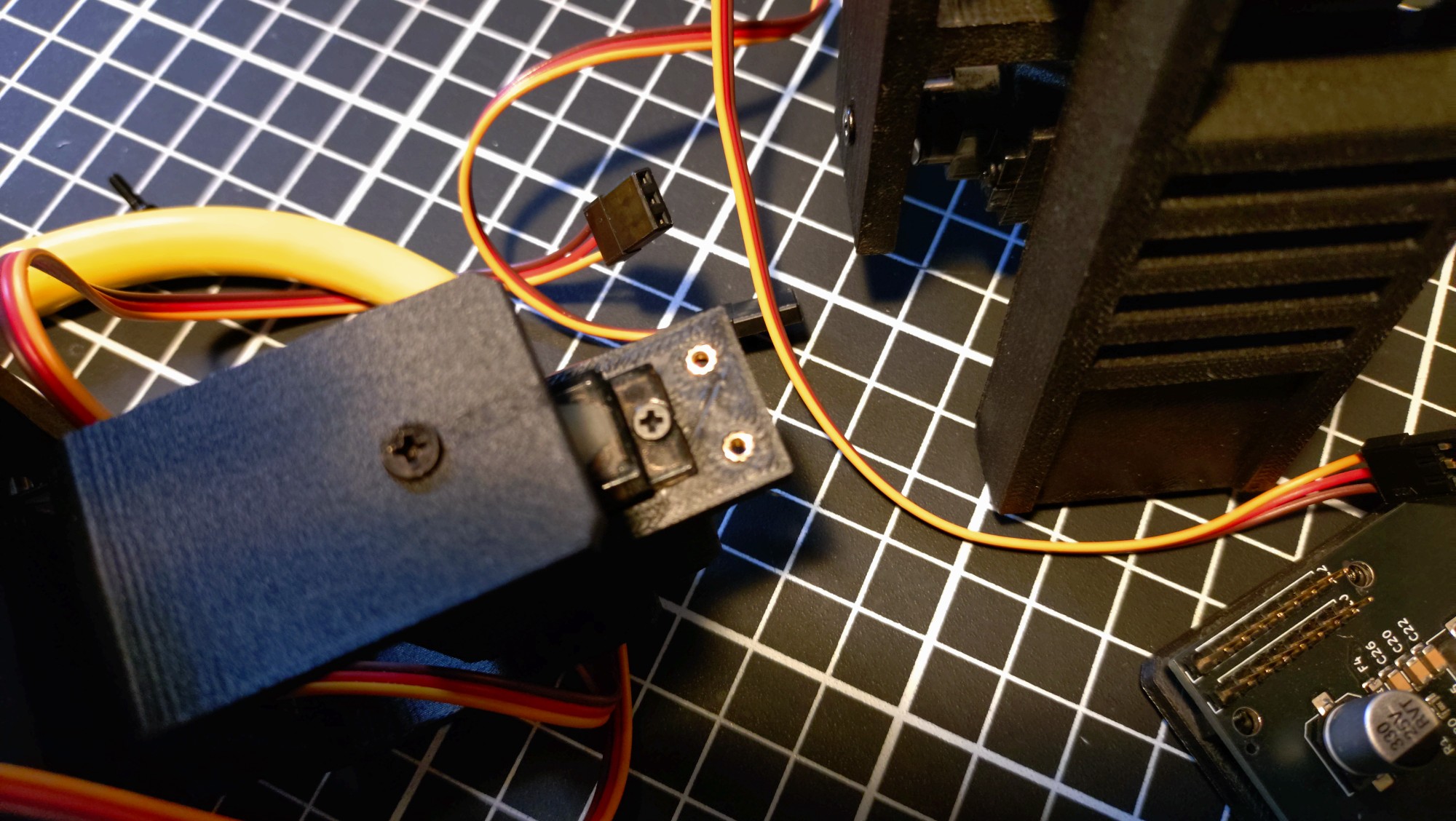
- 目前已經完成四隻腳的完全建構,耗時分析:
- Coxa (printing ~40 mins, post-processing ~10 mins) = ~50 mins
- Femur (printing ~90 mins, post-processing ~20 mins) = ~110 mins
- Femur-tibia link (printing ~75 mins, post-processing ~20 mins) = ~95 mins
- Tibia (printing ~45 mins, post-processing ~10mins) = ~55 mins
- Effector (printing ~100 mins, post-processing ~20 mins) = ~ 120 mins
- 3 * Peg (printing ~ 10 mins * 3, post-processing ~ 2 mins) = ~12 mins * 3 = 36 mins
- 1 Leg = 466 mins
- Total = 1864 mins =
~31 hr
後記
- 步行設計的部份,因為當初組裝時候馬達沒有校準(又是玩具馬達)、PLA 材料變形等因素,導致程式遲遲未達理想狀況。